在精密回转运动控制技术中,定位的精准性极为关键。RENISHAW雷尼绍的圆光栅系统正好符合这一标准。不过,这其中仍存在一些问题值得我们进一步探讨。
圆光栅系统需求背景
旋转动作在众多工业和科研场景中应用广泛。系统对旋转位置的精确度要求非常高。比如,在航空航天行业,某些部件的制造对旋转角度的精确度要求极高,误差极小。雷尼绍的圆光栅系统凭借其独特的旋转角度反馈测量技术,在运动控制领域实现了对旋转精度的精准控制,因此,它成为了众多场景下的优选解决方案。

这种基于RESM增量和RESA绝对值的圆光栅系统,能够精确测量旋转角度,从而为高精度旋转运动的控制提供了可能。这一技术使得许多需要精密旋转操作的任务得以更加流畅地执行。
单读数头系统问题
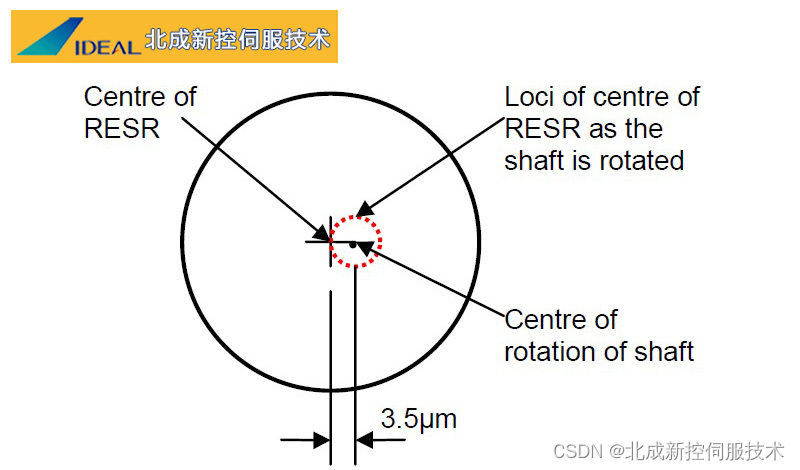
单独采用一个读数头的圆光栅系统会遇到一些挑战。它的精度会因偏心和轴承旋转中心的位移而受到很大影响。比如,以直径209毫米的圆光栅为例,若安装时存在3.5微米的误差,依据雷尼绍的官方资料,系统误差大概在±7弧秒左右。尽管这种偏心误差可以重复出现并得到一定的补偿,但它的存在依旧给系统带来了不确定因素。

在追求极高精度时,此类误差会对使用效果产生显著影响,有时甚至会导致产品质量下降、性能不稳定等问题。因此,迫切需要找到有效消除这些误差的方法。
系统误差计算方式
官方文件L-9517-4532-02-A对计算过程进行了详尽说明。当圆环直径为D毫米时,弧长e微米与角度ϕ弧秒的换算方法有明确的规定。通过具体实例,可以帮助使用者明白这种安装误差可能引起的系统误差的大小。
这为后续的误差分析和补偿措施的实施打下了坚实的基础。使用者可以依据实际的测量数据,对系统可能存在的误差进行评估,并且提前制定相应的应对方案。
误差补偿可行办法
误差补偿的方法不少。首先,对机械装置进行校准是基础步骤,这样做能提升圆光栅的安装精度,减少误差带来的不良影响。再者,在控制系统中加入专门的补偿软件也是一种常用方法,该软件能对误差进行修正和补偿。
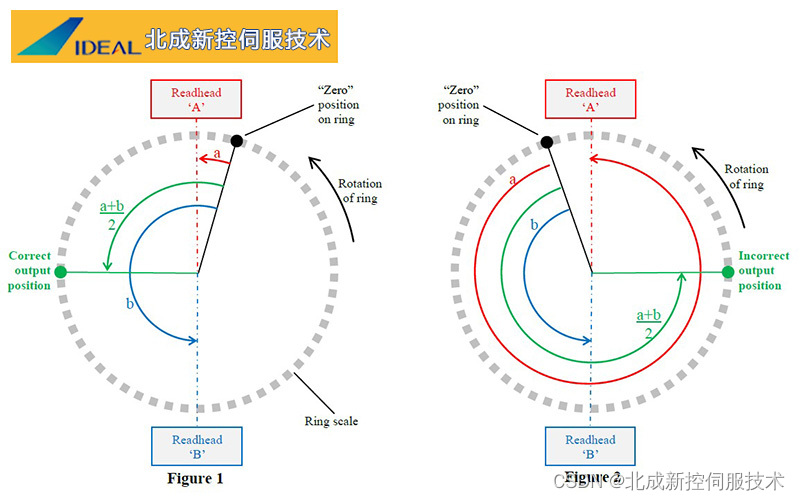
在同一旋转标尺上,若使用两个径向方向相反的读数设备,这便是一种既直接又高效的手段。这种做法能有效地抵消偏心误差,并且能消除所有奇数误差谐波,比如每转三圈产生的误差分量,进而大幅提高了系统的精确度。
双读数头应用局限

双读数头确实有其独特的优点,然而,它并不能解决所有的问题。比如,在处理椭圆度和拟圆度这类问题上,即便使用两个读头,也难以完全克服这些难题。由此,我们意识到,即便是双读数头系统,也并非万能,它同样存在一定的局限性。
使用时若发现系统误差主要来自形状偏差和近似圆度,那么我们必须寻找其他方法,不能仅仅依赖双读数头系统来应对这个问题。
双读数头信号处理
以增量光栅为例,两个读数头径向对准后,它们发出的信号需在控制器内整合。一种方法是,将正交的计数相加,这样能将圆光栅的分辨率增加到原来的两倍,进而提升测量的精确度。
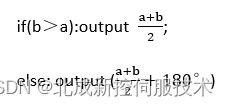
将两组数据在软件里合并,目的是让建模后的输出角度保持在0°到360°的范围内。为此,RENISHAW雷尼绍特别设计了双读数头Dsi接口,它与TONIC读数头系统配合,将两个读数头的信号合并成一条,这样便于控制端接收数据,同时也简化了后续的控制流程。
在使用雷尼绍圆光栅系统时,您是否遇到过特别麻烦的误差问题?如果这篇文章对您有所启发,不妨点个赞,并分享给更多人!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请联系本站,一经查实,本站将立刻删除。如若转载,请注明出处:http://www.aapeer.com/html/tiyuwenda/9870.html